機器人再進化 爬樓梯掃地機器人奪獎
機器人也能自己爬樓梯掃地!中州技術學院電機工程系師生團隊,歷時半年研發製作「家用樓梯除塵機器人」-雷米度(Let Me Do),能自己上樓梯清掃吸塵,今年首次參加「全國微電腦應用系統設計製作競賽」,在大專組與研究所組第一名都從缺下,榮獲大專組「機器人與自動機具類」第二名,展現堅強的研發實力。
由教育部主辦、國立臺灣科技大學承辦的「98年度全國微電腦應用系統設計製作競賽」,分為「儀錶類」、「控制類」、「機器人與自動機具類」、「信號處理與通訊類」、「嵌入式系統類」等五個比賽類組,共有全國大學院校與研究所計187個研發團隊報名參賽。中州技術學院電機系三年級張宇丞、程冠儒、呂佑安與許竣傑等四名同學,在劉昭忠教授指導下,合力完成會自動爬樓梯掃地吸塵的雷米度(Let Me Do)機器人,今年首次參加機器人類組比賽即勇奪全國大專組第二名(第一名從缺),令研發團隊興奮不已。
中州技術學院電機系劉昭忠教授表示,目前市面上所販售的家用清掃機器人只侷限於平面移動,因此研發團隊就想到如何讓機器人可以立體移動,自己上樓梯清掃吸塵,於是四位同學分工合作,一人寫程式、一人負責電路配線、兩人負責結構設計與組裝製作,經過一次又一次的測試與更換零件、改良結構體,終於完成第一代「家用樓梯除塵機器人」-雷米度(Let Me Do)。

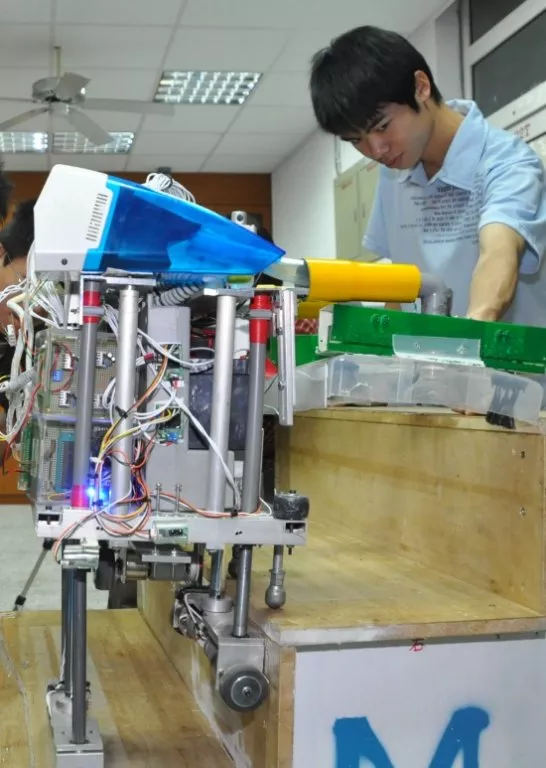
許竣傑同學表示,雷米度是大伙兒與劉昭忠老師吃了無數次便當,加上隊員幾次幾近翻臉的激盪中誕生的。雷米度的傳動機構分為升降、前進和左右移動三項動作,需要二支線性致動器、二個支撐輪和五個動力輪,並於機座底部加裝彈簧解決五個動力輪的懸空問題。
首先,中間動力輪的左右移動,完成樓梯階面的除塵動作。其次,兩支線性致動器同時將機體升高至下一階高度,且左右兩側四個動力輪往前移動,當二個支撐輪卡住下一階時,第一支線性致動器的左右兩個動力輪向上收起,機體繼續往前移動,直至機體一半以上在下一階面時,第二支線性致動器的左右兩個動力輪也向上收起,且繼續往前,完成爬樓梯動作。
程冠儒同學則表示,雷米度本身裝有五顆感測器,前端感測器讓機體升至適當高度,順利完成爬樓梯動作;左右兩側感測器,可防止機體左右移動清理時撞擊樓梯壁面。至於左右兩側下方的感測器,即避免機體因懸空而掉下樓梯,最後當機體爬至樓梯最高層時就會自動停止。程冠儒同學說,一般家用樓梯階面深度是25至30公分,為了順利清理樓梯階面,可將吸塵器的吸口調整至樓梯階面大小,藉由機體的左右移動,吸塵器會轉動毛刷,將灰塵掃入吸口,達到樓梯階面的清潔目的。

劉昭忠教授表示,「家用樓梯除塵機器人」正在申請台灣專利;第一代機器人每掃完一階約需2分鐘,目前師生團隊正從事第二代「全功能居家除塵型機器人」研發,向快速清掃、下樓梯和增進更多自動功能的目標邁進。
回應文章建議規則: